Cosmostreamer for DJI SDR with DJI gimbals
Product page
https://cosmostreamer.com/products/djisdr/
Video reviews
No reviewes yet.
Supported Gimbals
All DJI gimbals which officially supported by DJI SDR. Tested with DJI RS4 and DJI RS4 Pro.
Hardware
Cosmostreamer for DJI SDR can work on these boards:
Raspberry Pi 4B
Any RAM size. 1Gb, 2Gb, 4Gb, 8Gb.
- Two micro-HDMI outs
- Analog video out (CVBS, TV-out) in 3.5 mini-jack
- DSI display may be used. If DSI display connected - only HDMI-0 may be used.
- Wi-Fi 2.4/5 GHz
- Ethernet 10/100/1000 Mbit/s
- 2 USB 2.0 ports + 2 USB 3.0 ports
- 1 USB-C port (used for DJI SDR connection)
Raspberry Pi 5
Not supported
Without a hardware H264 video decoder this is a bad choice for using with Cosmostreamer.
Raspberry Pi Zero/ZeroW
Not supported due too slow single-core CPU
Raspberry Pi Zero2W
Not tested but should work
- Mini-HDMI port
- Wi-Fi 2.4GHz/5GHz
Raspberry Pi 3B/3B+
Not supported due USB incompatibility
Installing the Cosmostreamer firmware
- Get a blank microSD card of 8GB or larger. Insert the microSD card into the card reader
- Download ZIP-archive with firmware content
- Extract .img file from downloaded ZIP archive
- Use Win32DiskImager on Windows or Balena Etcher on Mac and write .img file on microSD card
- Insert the microSD card into the Raspberry Pi
- If you have a monitor or a TV with HDMI input - plug it to the Raspberry Pi 4B HDMI-0 port (nearest to USB-C port)
- Plug a standard USB power supply or powerbank to the Raspberry Pi. Raspberry Pi must start booting. A couple of reboots may be during the first boot process. This is just for initial Cosmostreamer's set up. For the normal Raspberry Pi power when DJI SDR is connected use a power scheme from the chapter Power for Raspberry Pi).
Power for Raspberry Pi
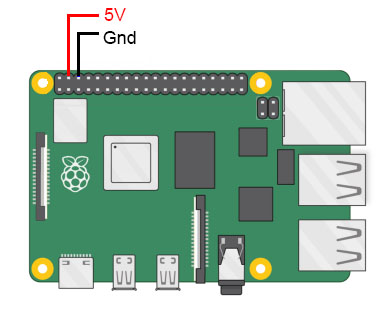
For using Raspberry Pi 4 with DJI SDR it must be powered via GPIO or from PoE.
Power with GPIO (pins)
Use any USB cable, need to cut it and connect to the RPI only 2 wires - Red (5V) and Black (Gnd). Then you can use it with any standard USB-A (bug USB port) power supply or powerbank.
Power with PoE
Need to use PoE Hat or PoE+ Hat

Network connection
Ethernet
Only for Raspberry Pi versions with Ethernet port. Connect Ethernet cable to the Raspberry Pi Ethernet port at one side and home router or PC/Mac Ethernet port on another side
Wi-Fi
Connect your PC/Mac or smartphone to Wi-Fi network cosmostreamer, password 1234512345
Settings and controls
Browser In Wi-Fi Access Point mode
Also you could open Cosmostreamer web admin page in browser
http://192.168.50.1
http://my.cosmostreamer.com
Then click "Device settings" in menu shown by click on Menu icon in right bottom corner.
Browser in WLAN client mode
Open in browser http://cosmostreamer.local
This is dynamical host name so may not work properly if multiple Cosmostreamer devices in the same network or IP changes.
Then click "Device settings" in menu shown by click on Menu icon in right bottom corner.
Windows application
Download, install and run CosmoViewerNG application.
Mac application
Download, install and run CosmoViewerNG application.
Firmware update
- Run CosmoViewerNG for Win or for Mac or open web page and then open device settings, chapter "System"
- Download the Latest firmware update file
- Choose downloaded update file (with .csuf extension) in "Firmware update" field and press "Upload file" button
- Raspberry Pi must goes to reboot automatically after update installed
Changing camera type
In Cosmostreamer system terminology, a camera is any device that Cosmostreamer can work with. DJI Pocket, DJI Osmo, Goggles - this all a "camera".
MicroSD image with Cosmostreamer configured for "DJI Goggles2/3/Integra/N3" by default, so need to change it to type #31 "DJI SDR":
- Open device settings in CosmoViewerNG application or in web interface
- Go to chapter "Info"
- Choose camera type "DJI SDR (type #31)"
- Disable option "Allow auto detection" if enabled
- Don't forget to click "Save" button.
License key
License key is a text string, unique for each Raspberry Pi. Each camera type needs different license keys. It's possible to install multiple amount of license keys on one device and use this device for some camera types, i.e. Pocket Osmo, Pocket 2, and others. Need to buy license for correct operation process.
- Buy license key on a product page
- Make a photo of HDMI display or screenshot of the app with a QR image and send it in email on cosmostreamer@gmail.com for making a license key
- When you got a license key - use web interface or CosmoViewerNG application, menu "device settings" -> "License" and insert license key into field. And click "Install license" button.
DJI SDR RX connection
Standard USB-C to USB-C cable
Not supported!
Custom USB-C to USB-C cable
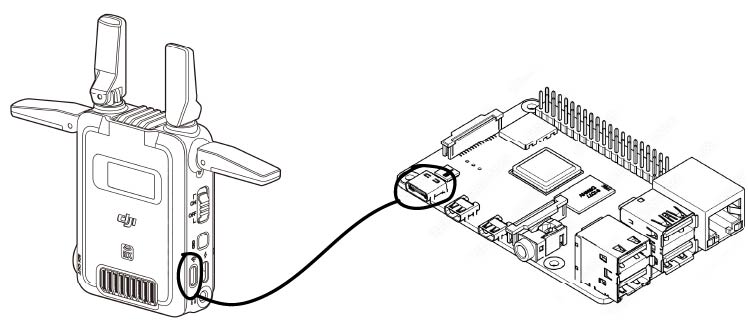
Need to use a standard USB-C to USB-C cable but with a cutted power wire (or wires) inside the cable.
Red wire (5V) must be cutted for using with the DJI SDR RX

One side - to the Raspberry Pi 4 USB-C port. Another side - into DJI SDR RX (receiver unit) "Firmware Update and Video Output Port".
DJI SDR TX connection
Without or with only one focus motor
This is an official DJI connection scheme. Use the camera control cable (USB-C 30cm or any other USB-C to USB-C cable) to connect the video transmission/LiDAR range finder port on the gimbal to the USB-C power and gimbal communication port on the DJI SDR TX (transmitter). This setup allows the gimbal to power the transmitter.
If you want to use a focus motor - use another USB-C to USB-C cable and connect it to the "In" USB-C port on the motor and to the "Focus Motor Port (USB-C)" on the gimbal.
Motor can be ONLY in "Focus" mode to be possible to control it from Cosmostreamer!
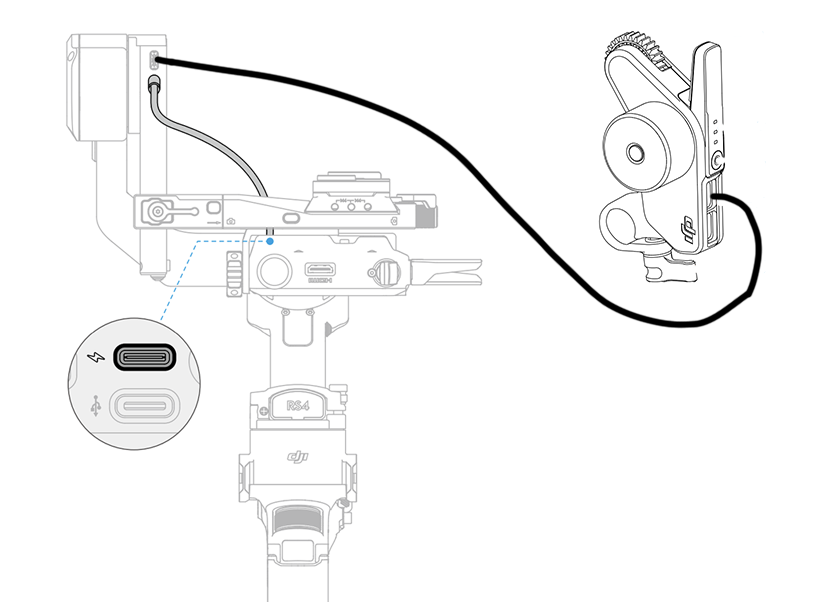

With two motors
Two motors officially supported only by DJI RS4 Pro. But with a connection trick RS4 (not Pro) also works with the two motors perfectly.
To control two motors (e.g., focus and zoom, or focus and IRIS), a special connection trick is required.
Firtst motor - as usual, connect to the "Focus Motor Port (USB-C)" on the gimbal. This motor can be ONLY in "Focus" mode!
Connect a second motor's "In" USB-C port to the video transmission/LiDAR range finder port on the gimbal. Then connect this motor's "Out" USB-C port to the gimbal communication port on the DJI SDR TX (transmitter). I.e. DJI SDR TX will be connected only to the this motor. This motor can be in any mode (Focus, Zoom, IRIS)
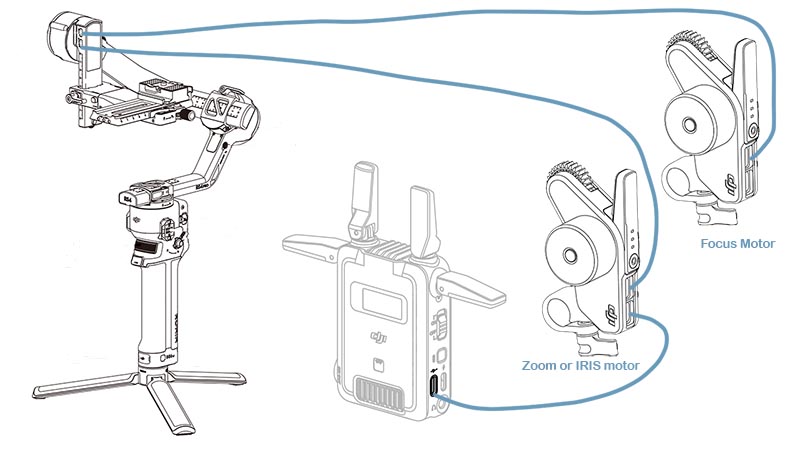

With three motors
Three motors officially supported only by DJI RS4 Pro. But with a connection trick RS4 (not Pro) also should work with the three motors.
To control three motors (e.g., focus, zoom and IRIS), a special connection trick is required.
First motor - as usual, connect to the "Focus Motor Port (USB-C)" on the gimbal. This motor can be ONLY in "Focus" mode!
Connect a second motor's "In" USB-C port to the video transmission/LiDAR range finder port on the gimbal. Then connect this motor's "Out" USB-C port to the third motor's "In" USB-C port. And "Out" USB-C port on this motor - to gimbal communication port on the DJI SDR TX (transmitter). These motors can be in any mode (Focus, Zoom, IRIS)
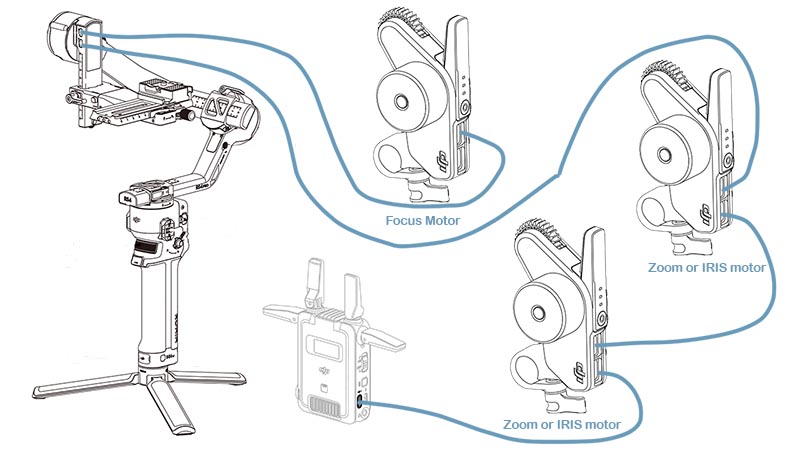

Focus motor is not shown on this photo
Downloads
- Full microSD image with firmware
- Latest firmware update file
- Changelog file
- All files
- Official DJI SDR User Guide
- Official DJI RS4/RS4 Pro User Manual
- DJI Focus Pro User Manual
FAQ
What gimbals are supported?
All DJI gimbals which are officially supported buy DJI SDR should work. Tested with DJI RS4 and DJI RS4 Pro.
Can I control a focus motor?
Yes. With a standard USB cables connection from DJI focus motor to RS4 or another DJI Gimbal focus motor works fine.
Can I control additional motors (zoom, IRIS)?
Yes, but need to use a non-standard connection scheme. Read here please: #With_two_motors